Forcing my Reolink cameras to play nice with the other kids
So from my post about replacing my doorbell with a security camera you might have noticed that I have a accumulated quite a few PoE security cameras that I use with Frigate to get object detection and fancy integrations with Home-Assistant. The part I didn’t go into detail about was the struggle with my latest cameras, the [Reolink 820a](https://reolink.com/product/rlc-820a/].
So on the surface these cameras are great. They look nice, support power over Ethernet, doesn’t rely on a cloud service and are very simple to set up. They sport 4k resolution and have decent night vision capabilities. The problem comes when you want to integrate them with any kind of selfhosted NVR software, like Frigate, since they only support H265 for the high resolution stream. H265 or High Efficiency Video Coding (HEVC), is the successor to the widely used H264. The benefits of H265 is that it offers much better compression, but the problem is that purchasing a license for H265 is much more expensive so many browser and other tools don’t support it. In addition, the “substream” which is a common feature among security cameras which is basically a second video stream that has a lower resolution and framerate to do object and motion detection on, had a way too low resolution for my usecase. Lower resolution means you can’t easily detect smaller objects, and I need to detect my tiny cats.
My first approach was to contact support, and to their credit they were surprisingly helpful. I had noticed that the substream on the Reolink cameras did use the H264 encoding, so I imagined that it should be fairly simple to make this change in software for the main stream. As it turned out this wasn’t an uncommon request for the Reolink support team and they had a custom version of the camera firmware ready for me that I could try. This version of the firmware did change the main stream to use H264, but unfortunately the image quality was much poorer and there were weird bugs like that the frame rate of the stream stayed constant and could not be changed. This didn’t solve my problems, and so I decided to revert back to the stock firmware and manage the stream encoding myself.
Cameras tend to expose an RTSP stream which NVR’s like Frigate consume, so I found this neat project rtsp-simple-server which allowed me to redistribute the camera streams. Now the hardest part was yet to come, as I needed to manually decode H265 and encode H264 in addition to creating a new substream that matched my requirements. Enter the nightmare that is trying to learn FFmpeg.
Don’t get me wrong, I love FFmpeg, it is incredibly powerful and supports almost anything you want to do with video. But the learning curve is steep, the documentation is complete but extremely minimal with details and examples. But the biggest hurdle is actually all the examples scattered around the internet which claim to do one thing, but are actually working more by accident than anything else. This sent me down quite a few rabbit holes and old mailing lists to figure out what the various flags actually meant. Finally I ended up with this:
ffmpeg \
-use_wallclock_as_timestamps 1 -fflags nobuffer -loglevel warning -hide_banner \
-rtsp_transport tcp -hwaccel qsv -c:v hevc_qsv \
-i 'rtsp://admin:[email protected]:554' \
-vf 'fps=fps=20,scale_qsv=w=3840:h=2160' -c:v h264_qsv -timestamp now -g 100 \
-profile main -b:v 6M -c:a copy -f rtsp -rtsp_transport tcp rtsp://0.0.0.0:8554/stua \
-vf 'fps=fps=5,scale_qsv=w=1280:h=720' -c:v h264_qsv -timestamp now -g 25 \
-profile main -b:v 1M -an -f rtsp -rtsp_transport tcp rtsp://0.0.0.0:8554/stua_sub
Disclaimer; I found it very difficult to fully grasp all of these flags. Especially since they can change meaning depending on where they are placed relative to the input and output declarations. So please throw some feedback at me if you see something that’s incorrectly explained.
Input and global arguments:
-use_wallclock_as_timestamps 1: Ignore the timestamps from the source video, as they tend to be wrong.-fflags nobuffer: Reduce latency by not buffering during the input analysis-loglever warning: Reduce the noise of the output-hide_banner: Hide the info banner FFmpeg prints when invoked-rtsp_transport tcp: Using tcp rather than udp for the input streamhwaccel qsv: Use Intel QuickSync for hardware acceleration-c:v hevrc_qsv: Use the hevc decoder from Intel QuickSync to decode the input stream-i 'rtsp://admin:[email protected]:554': Finally we have our input stream from the Reolink camera
Output arguments for the main stream:
'fps=fps=20,scale_qsv=w=3840:h=2160': Set it to 20fps and 4k resolution at 3840x2160-c:v h264_qsv: Use the Intel QuickSync encoder to encode the output-timestamp now: Create new timestamps for the output stream-g 100: Set the picture group to (fps*5) to force every 5th frame to be an I-frame-profile main: Use the ‘main’ quality profile instead of ‘high’-b:v 6M: Set the video bitrate to 6mbps-c:a copy: Just copy the audio as it is-f rtsp: Use the rtsp format-rtsp_transport tcp: Use tcp for the pushing to the rtps streamrtsp://0.0.0.0:8554/stua: The rtsp-simple-server endpoint where we push the stream
As you can probably tell next comes the output arguments for the substream which
just have a lower resolution and fps, and uses the -an flag which ignores the
audio stream as it’s not useful in my case.
There are a few things to notice here though. I could have used the open source
vaapi library instead of qsv but I couldn’t get it to work properly as the
stream ended up getting jittery and the performance was slightly worse than with
qsv. For an example on how to build a docker container with the required
drivers for qsv take a look at akashisn/ffmpeg
The other thing is that scale_qsv actually supports setting the
framerate, but due to a bug in another library that qsv relies on this doesn’t
work. I spent a substantial amount of time trying to fix the timestamps both in
the input from the camera but also in the stream I was creating. In it’s current
form the transcoder simply ignores the timestamps from the camera and creates
new ones, this turned out to be the most reliable approach. I did have to make
one adjustment to Frigate though which was to remove
-use_wallclock_as_timestamps 1 from the Frigate input_args. For some reason
I’ve not yet understood, this flag caused the resulting recordings to show
frames out of order.
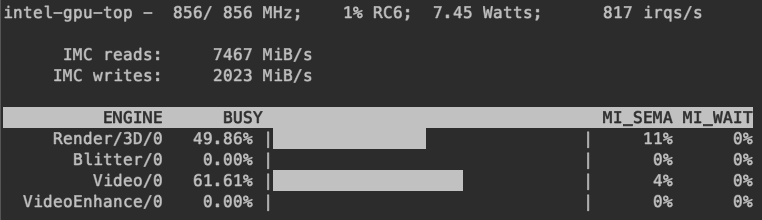
Now you might ask, with 3 4k cameras how much power are you wasting on this?
Turns out, not so much. I’ve got two machines which can run the transcoder pod
and a quick peak at intel_gpu_top shows that it’s not even running at the
maximum frequency which is 1200 MHz.
And for reference my gpu on the machine that is running the Frigate pod is barely breaking a sweat, which is expected as it’s now shielded from decoding H265, which it could have done. But that would have made it very cumbersome to create a decent substream. With the two step approach I can also distribute the work better on my Kubernetes cluster. A quick note on hardware support though. I’ve got two machines with an Intel E-2224G processor, which contains the Intel® UHD Graphics P630. This GPU can decode and encode H264, but older versions could not. Something to keep in mind when experimenting with this.
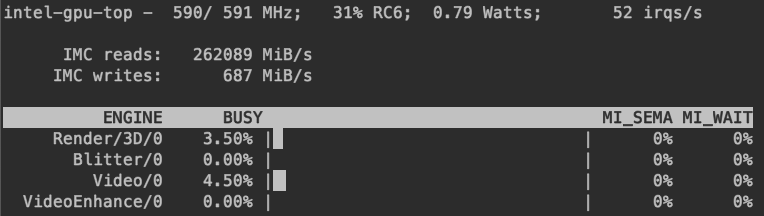
Btw, the IMC reads and writes kept fluctuating quite a lot, so I’m guessing the value for reads on the last image is somewhat higher than the actual value.
For the rtsp-simple-server the configuration was very straight forward so I just needed to set the paths of the mainstream and substreams:
paths:
stua:
runOnInit:
ffmpeg <input_flags> -i 'rtsp://admin:[email protected]:554' \
<main_output_flags> rtsp://0.0.0.0:8554/stua \
<sub_output_flags> rtsp://0.0.0.0:8554/stua_sub
runOnInitRestart: yes
stua_sub:
source: publisher
Basically I’m adding a path stua which on startup will run the ffmpeg command
we discussed earlier. This command publishes the main stream to the stua path,
and the substream to the stua_sub path. Right now I’m running all of this in a
single container built like so:
FROM aler9/rtsp-simple-server AS rtsp
FROM akashisn/ffmpeg:4.4.1-qsv
COPY --from=rtsp /rtsp-simple-server /
ENTRYPOINT [ "/rtsp-simple-server" ]
Eventually though, I’ll probably split this into two images, and run one container for each camera to better be able to share the load on my Kubernetes cluster.
Now I just add the two streams to Frigate as if it were any other camera and I can finally have my recordings in a format that any browser can play, and a substream with high enough resolution to detect my cat’s as they wander off into the sunset. High five :D
Leave a comment: